I am currently a Research Scientist at Nanyang Technological University (NTU) and ANGEL CorpLab, Singapore, where I work with Prof. Jianmin Zheng. Prior to this, I was a Research Fellow at the National University of Singapore (NUS). I obtained my PhD degree from PCA Lab, Nanjing University of Science and Technology (NJUST), under the supervision of Prof. Jian Yang and Prof. Jin Xie. In 2023, I was a visiting student at CVLab, EPFL, Switzerland, supervised by Dr. Mathieu Salzmann. In 2018, I spent several months as a Research Intern at the Inception Institute of Artificial Intelligence (IIAI), Abu Dhabi.
My research interests lie in 3D computer vision and reinforcement learning (RL), with a particular focus on:
- 3D scene reconstruction and understanding for spatial intelligence
- Robotic navigation and manipulation for embodied AI
- On-policy/off-policy/offline RL theory and (world-)model based RL/planning
My long-term goal is to develop spatially intelligent agents that can understand, reason about, and act in the physical world!
🔥 News
- 2026.07: I was invited to serve as an Area Chair for ICIG 2026 and as an International Program Committee (IPC) Member for Pacific Graphics 2026.
- 2026.06: 🎉 Our paper FUSER is selected as 🏆CVPR 2026 Best Paper Award Candidate. It is the first point cloud-centric 3D reconstruction foundation model for feed-forward multiview registration without any pairwise matching or global synchronization.
- 2026.02: 🎉 Four papers were accepted by CVPR 2026 (⭐ 1 Oral, 1 Highlight).
- 2025.08: 🎉 One paper was accepted by IEEE Robotics and Automation Letters.
- 2025.07: 🎉 Three papers were accepted by AAAI 2026.
- 2025.06: 🎉 One paper was accepted by ICCV 2025.
- 2025.06: 🎉 One paper was accepted by PRCV 2025.
- 2025.05: 🎉 One paper was accepted by ICML 2025.
- 2025.02: 🎉 One papers were accepted by CVPR 2025.
- 2024.12: 🎉 One paper was accepted by AAAI 2025.
- 2024.10: 🎉 One paper was accepted by IROS 2025.
- 2024.07: 🎉 One paper was accepted by ECCV 2024.
- 2024.05: 🎉 One paper was accepted by IEEE Transactions on Circuits and Systems for Video Technology.
- 2024.04: 🎉 One paper was accepted by ICASSP 2024.
- 2023.10: 🎉 One paper was accepted by IROS 2023.
- 2023.09: 🎉 One paper was accepted by NeurIPS 2023.
- 2023.08: 🎉 One paper was accepted by ACM MM 2023.
- 2023.07: 🎉 One paper was accepted by ICCV 2023.
- 2023.07: 🎉 Two paper were accepted by AAAI 2023.
- 2023.03: 🎉 One paper was accepted by CVPR 2023.
- 2022.09: 🎉 One paper was accepted by IEEE Transactions on Neural Networks and Learning Systems.
- 2022.08: 🎉 One paper was accepted by ACCV 2022.
- 2022.07: 🎉 One paper was accepted by ECCV 2022.
- 2022.03: 🎉 One paper was accepted by IEEE Transactions on Neural Networks and Learning Systems.
- 2022.01: 🎉 One paper was accepted by ACPR 2021 (🏆 Best Paper Award).
- 2021.06: 🎉 One paper was accepted by ICCV 2021.
- 2022.07: 🎉 One paper was accepted by AAAI 2022.
- 2021.07: 🎉 One paper was accepted by AAAI 2021.
- 2021.08: 🎉 One paper was accepted by IJCAI 2021.
- 2018.11: 🎉 One paper was accepted by PRCV 2018.
📝 Selected Publications
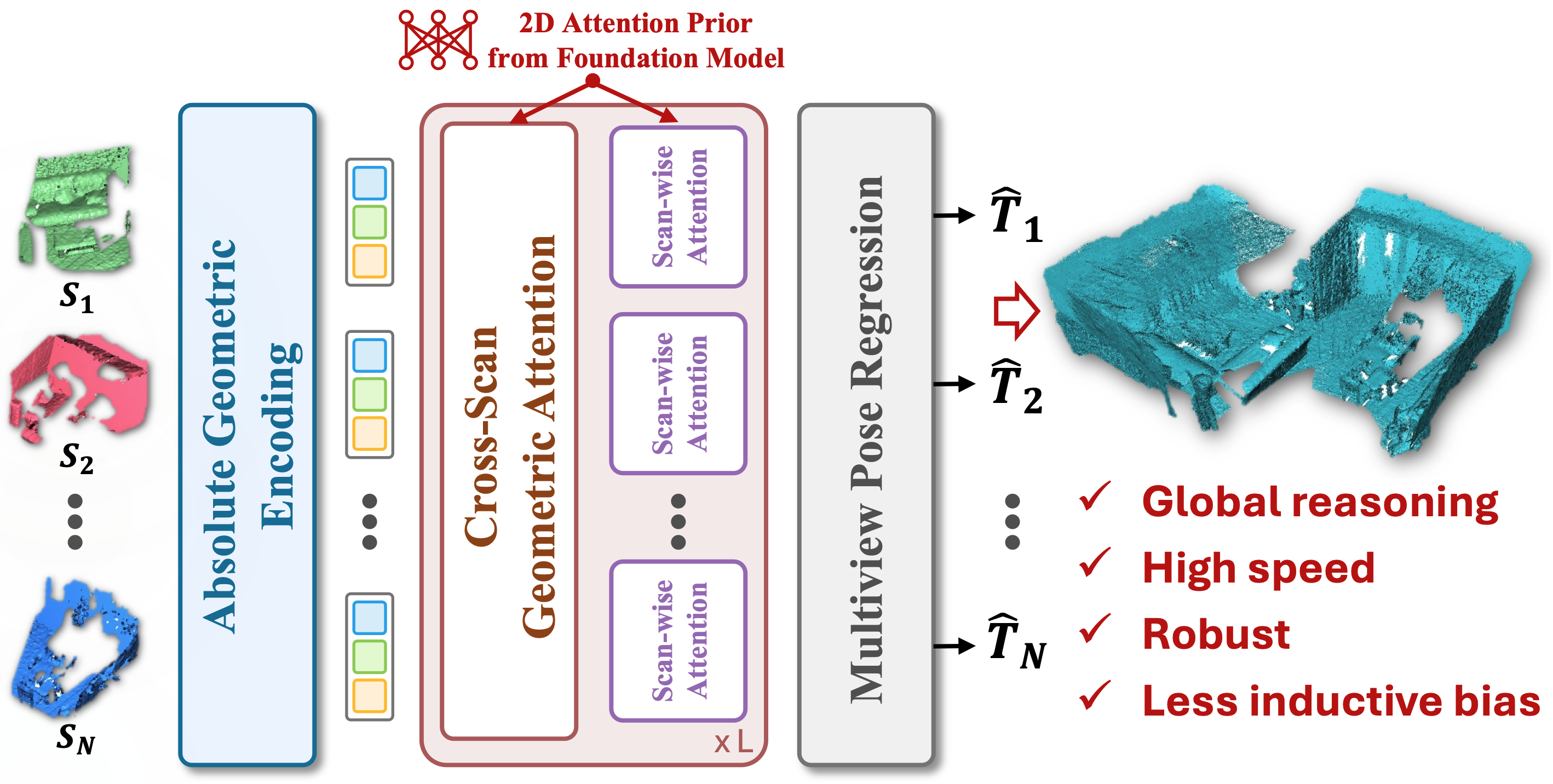
FUSER: Feed-Forward Multiview 3D Registration Transformer and SE(3)N Diffusion Refinement (Code, Project, ⭐ Oral, Best Paper Award Candidate)
Haobo Jiang, Jin Xie, Jian Yang, Liang Yu, and Jianmin Zheng
- The first point-cloud-oriented 3D foundation reconstruction model for feed-forward multiview point-cloud registration.
- An SE(3)N diffusion refinement model for multiview pose refinement.
- A new “pairwise-free” paradigm that cuts runtime from minutes to seconds while maintaining SOTA performance.
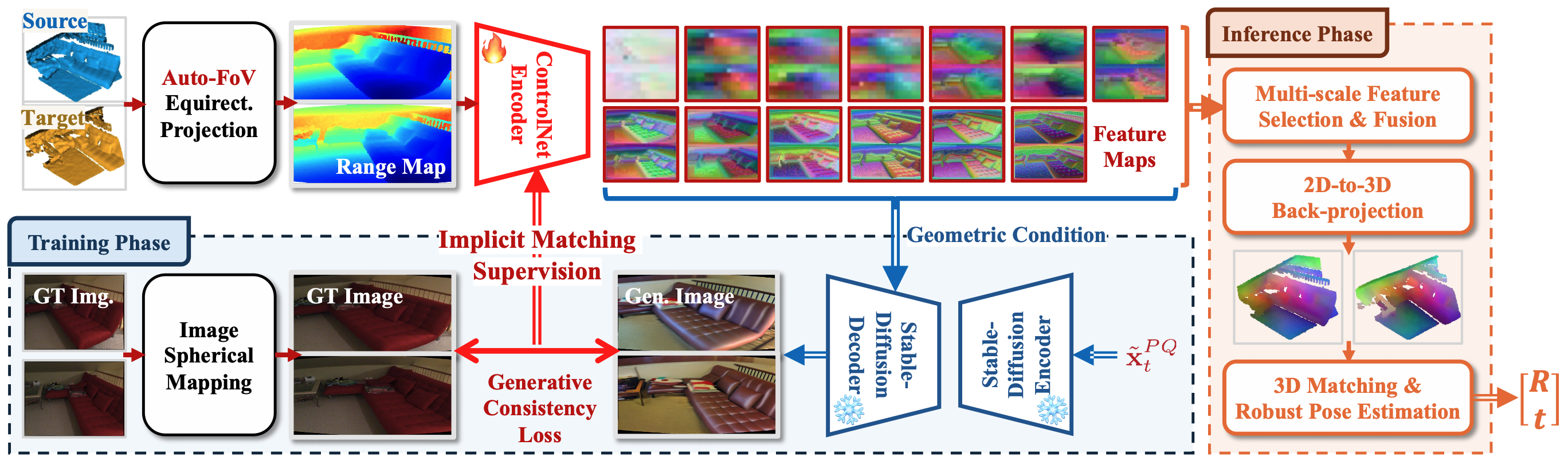
GM-R2: Generative Matching Learning for Unsupervised Geometric Representation and Registration (Code, ⭐ Highlight)
Haobo Jiang, Liang Yu, and Jianmin Zheng
- We propose GM-R2 for unsupervised 3D descriptor learning via generative cross-view matching.
- We design a Coupled ControlNet for geometry-only cross-view synthesis and matching.
- We introduce Auto-FoV ERP for intrinsics-free high-resolution range projection.
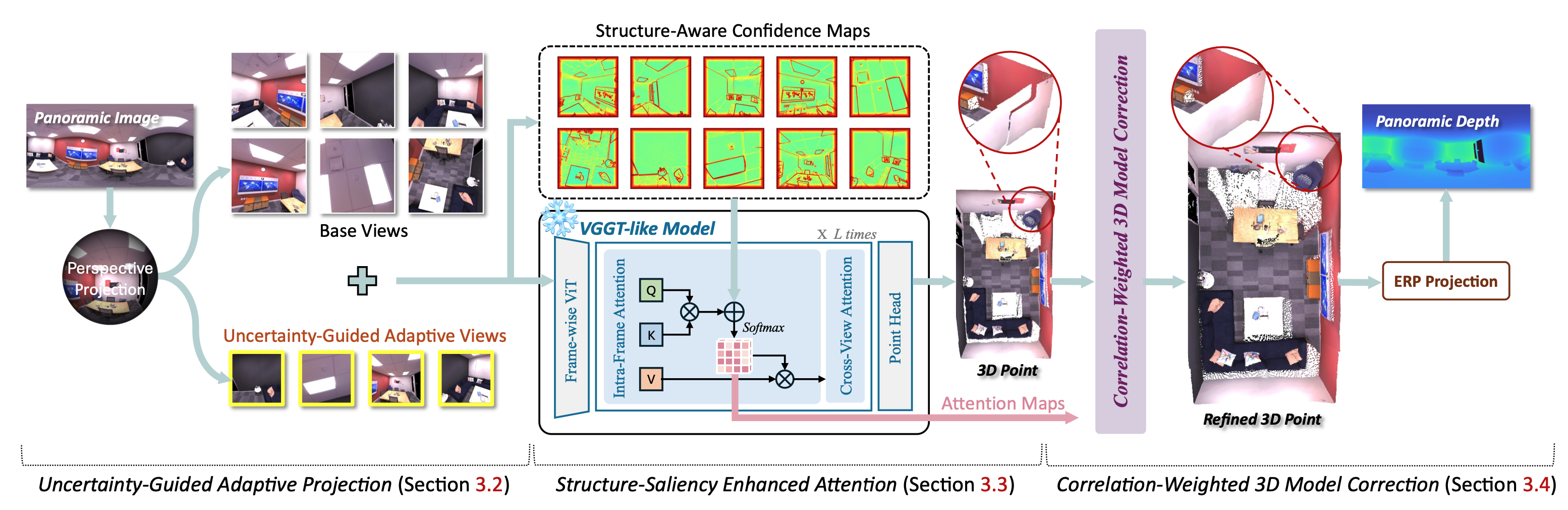
VGGT-360: Geometry-Consistent Zero-Shot Panoramic Depth Estimation (Code)
Jiayi Yuan, Haobo Jiang, De Wen Soh, and Na Zhao
- A training-free framework for geometry-consistent panoramic depth estimation via multi-view 3D reconstruction.
- Uncertainty-guided projection and structure-aware attention for reliable cross-view reasoning.
- A view-correlated paradigm that overcomes per-view inconsistency for globally coherent depth.
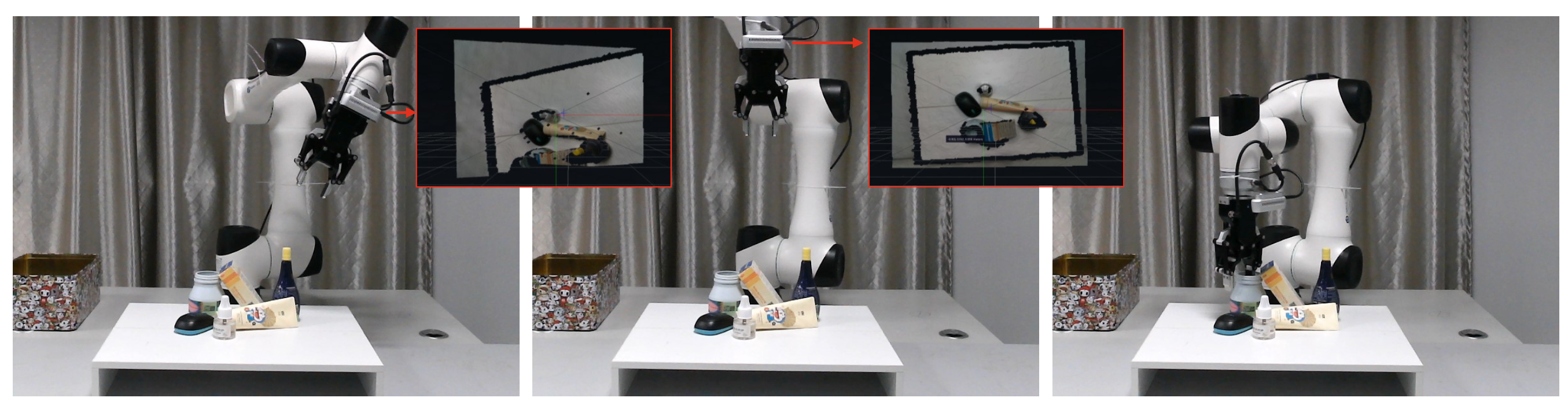
A Cross-view Fusion Framework for Robust 6-DoF Grasp Pose Estimation (Code)
Kangjian Zhu, Haobo Jiang#, Jianjun Qian, Jin Xie
- A cross-view fusion framework for robust 6-DoF grasp pose estimation under occlusion.
- A self-supervised contrastive strategy for spatially consistent and direction-discriminative point features.
- A cross-view-aligned cylinder integration module for fine-grained grasp-context modeling.
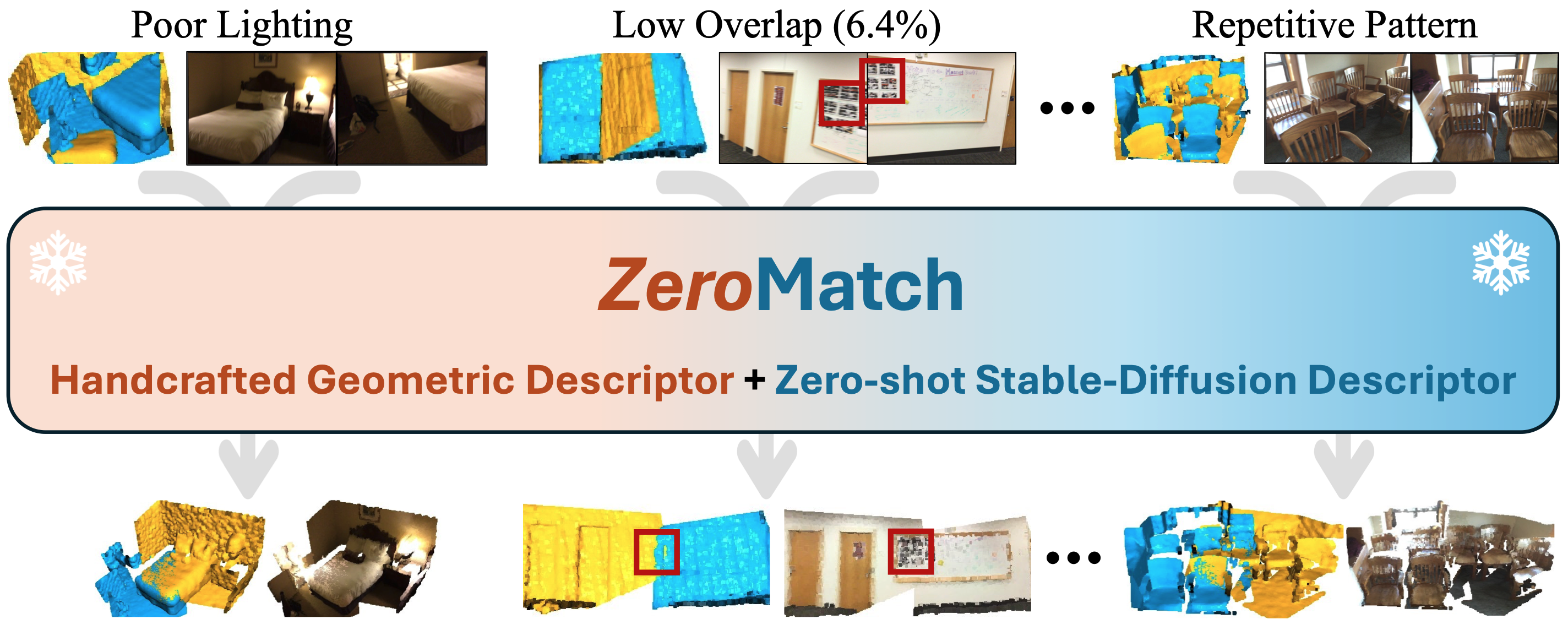
Zero-shot RGB-D Point Cloud Registration with Pre-trained Large Vision Model (Code)
Haobo Jiang, Jin Xie, Jian Yang, Liang Yu, and Jianmin Zheng
- The first zero-shot RGB-D point-cloud registration framework for robust matching without task-specific supervision.
- A training-free local-global descriptor that combines local FPFH geometry with global Stable-Diffusion contextual priors.
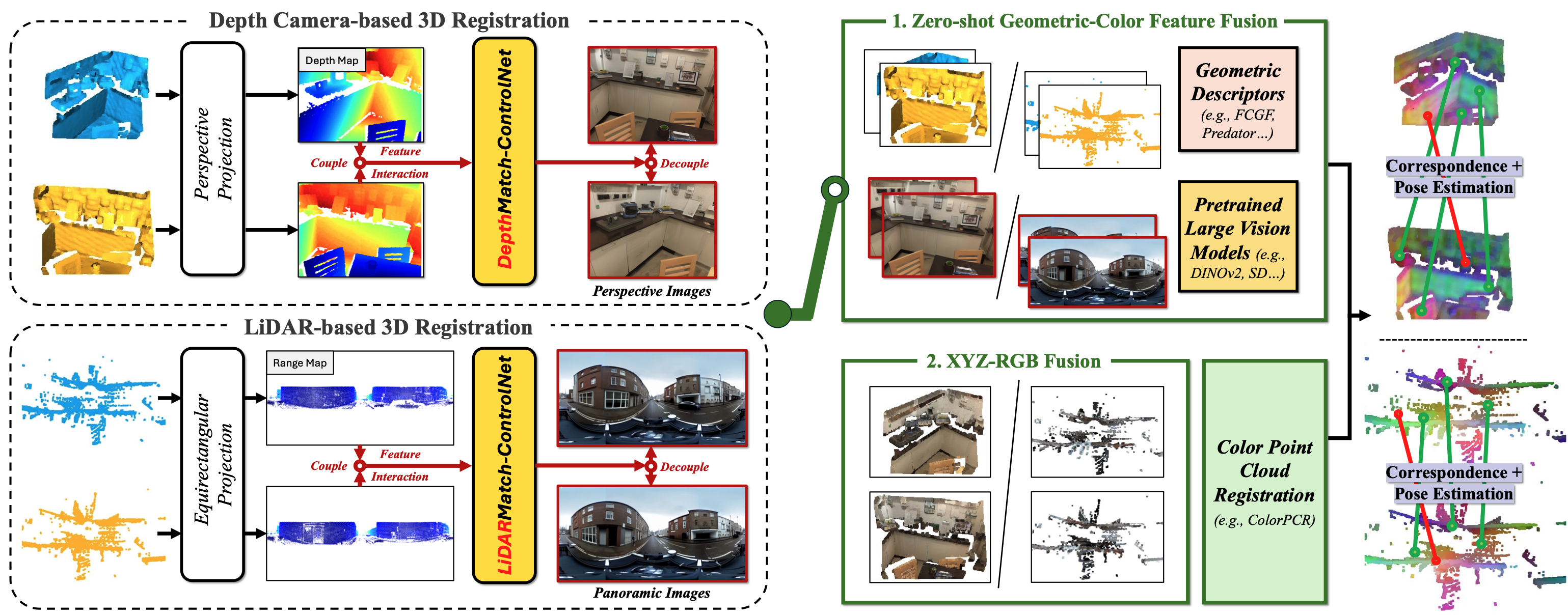
Generative Point Cloud Registration (Code)
Haobo Jiang, Jin Xie, Jian Yang, Liang Yu, and Jianmin Zheng
- The first geometry-to-image synthesis-driven 3D matching paradigm that augments geometry-only descriptors with generated RGB cues.
- Match-ControlNet for reliable, cross-view consistent image generation from point clouds.
- A plug-and-play framework that converts generated color cues into stronger 3D correspondences.
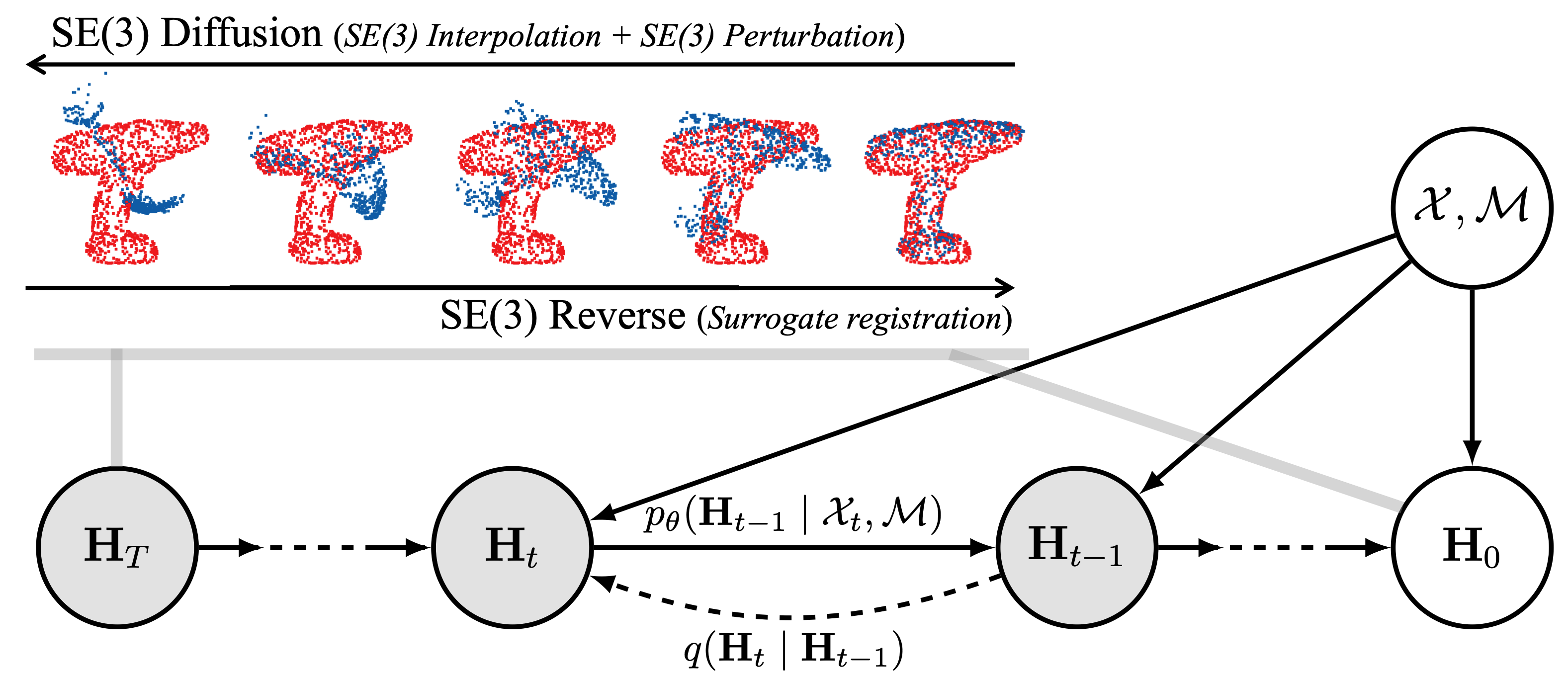
SE(3) Diffusion Model-based Point Cloud Registration for Robust 6D Object Pose Estimation (Code)
Haobo Jiang, Mathieu Salzmann, Zheng Dang, Jin Xie, and Jian Yang
- The first SE(3) diffusion registration framework for robust 6D object pose estimation.
- A manifold-aware denoising diffusion process that progressively refines noisy poses on SE(3).
- A plug-and-play diffusion paradigm that boosts existing registration networks via surrogate modeling.

NaviFormer: A Spatio-Temporal Context-Aware Transformer for Object Navigation (Code)
Wei Xie, Haobo Jiang, Yun Zhu, Jianjun Qian, Jin Xie
- NaviFormer: a navigation transformer for spatio-temporal cue aggregation and reliable decision-making.
- A passable frontier-enhanced encoder for modeling spatial layouts, agent trajectories, and exploration regions.
- A navigation decoder that leverages layouts, pose history, and frontiers for better action prediction.
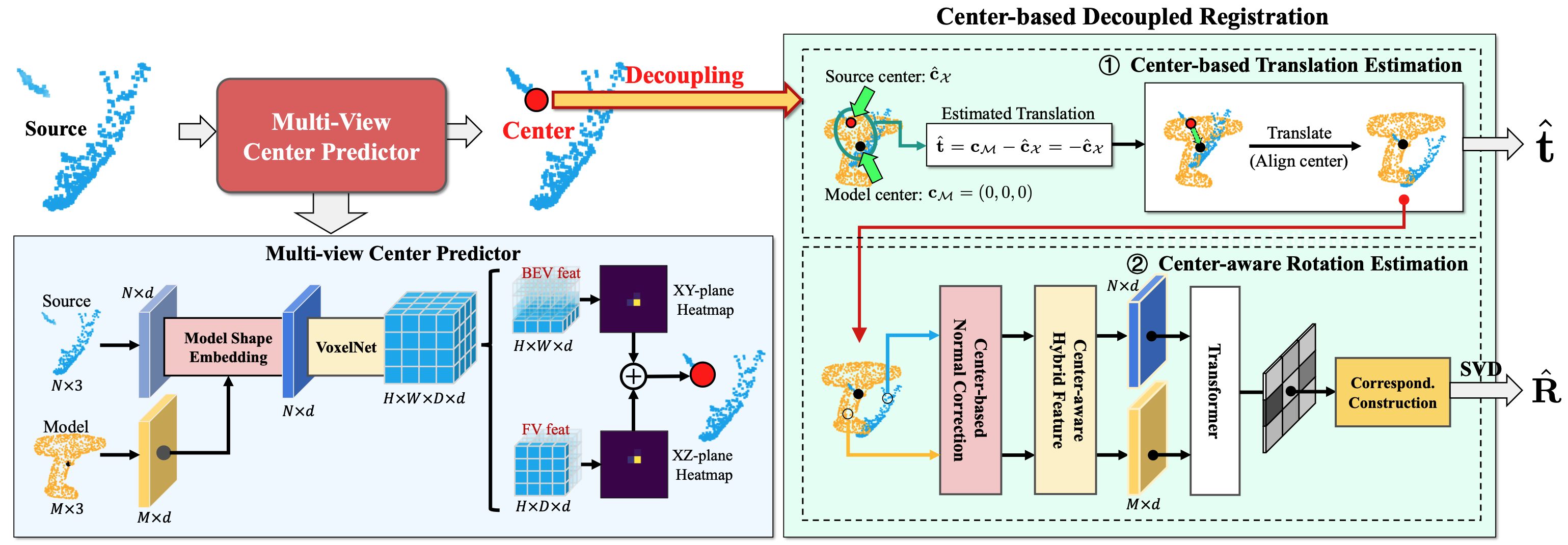
Center-Based Decoupled Point Cloud Registration for 6D Object Pose Estimation (Code)
Haobo Jiang, Zheng Dang, Shuo Gu, Jin Xie, Mathieu Salzmann, and Jian Yang
- A center-based decoupled registration framework for robust 6D object pose estimation.
- A correspondence-free center predictor that decouples translation from rotation.
- A center-aware rotation module with part-aware features and normal correction for reliable matching.
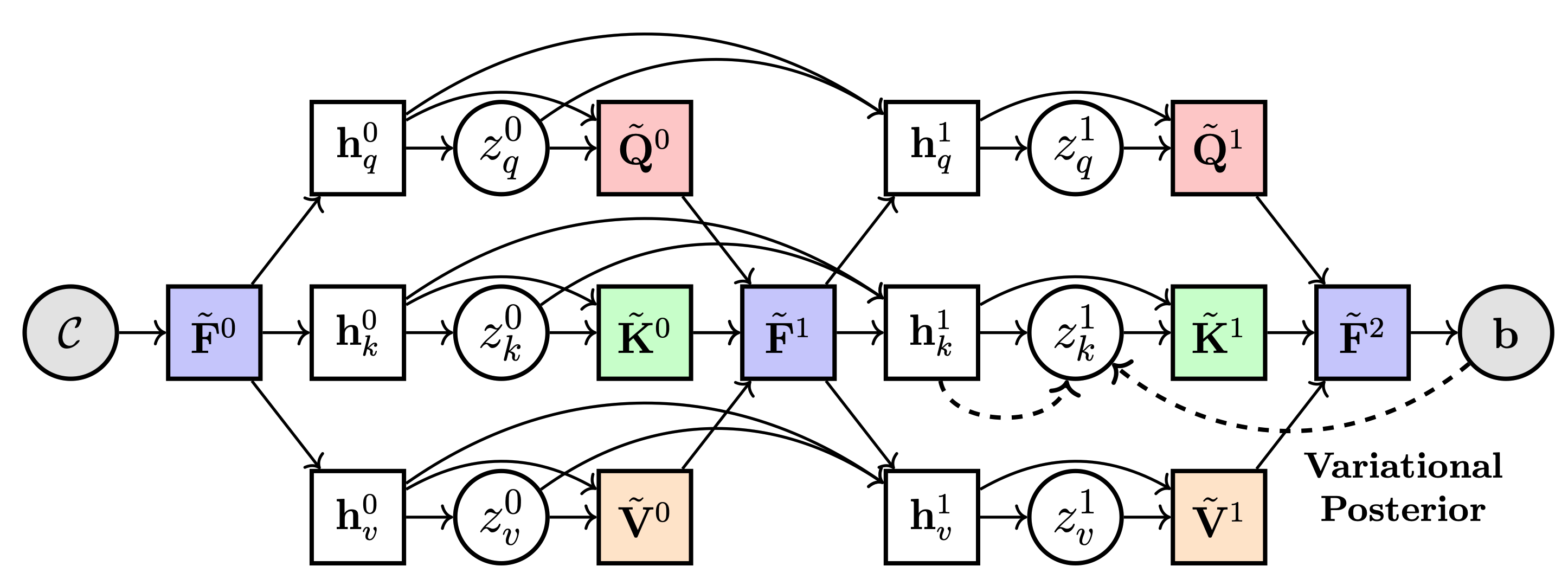
Robust Outlier Rejection for 3D Registration with Variational Bayes (Code)
Haobo Jiang, Zheng Dang, Zhen Wei, Jin Xie, Jian Yang, and Mathieu Salzmann
- A variational non-local network for outlier rejection via Bayesian long-range correspondence modeling.
- A customized probabilistic graphical model with a variational lower bound for optimization.
- A Wilson score-based voting scheme for high-quality inlier search, with theoretical advantages over RANSAC.
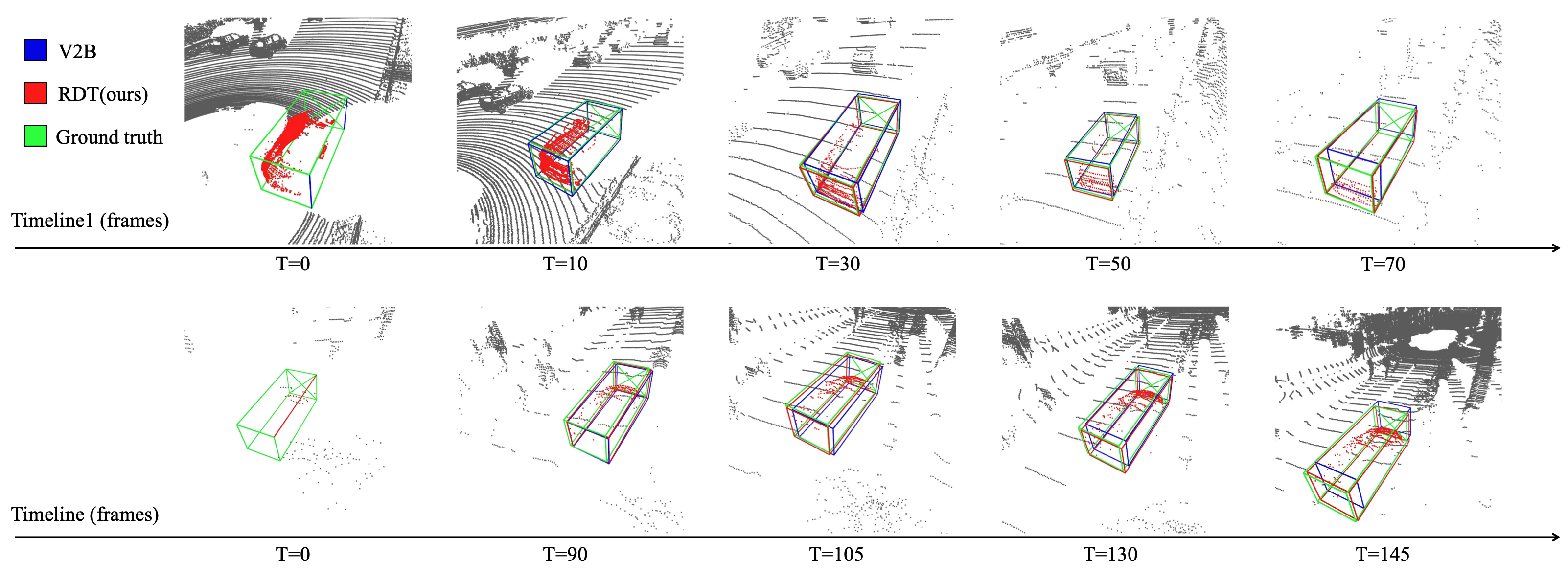
Point Cloud Registration-Driven Robust Feature Matching for 3D Siamese Object Tracking (Code)
Haobo Jiang, Kaihao Lan, Le Hui, Guangyu Li, Jin Xie, and Jian Yang
- A 3D registration-driven Siamese framework for robust point-cloud tracking.
- A tracking-specific non-local registration module for template-search alignment.
- A registration-aided feature aggregation module for refined feature matching.
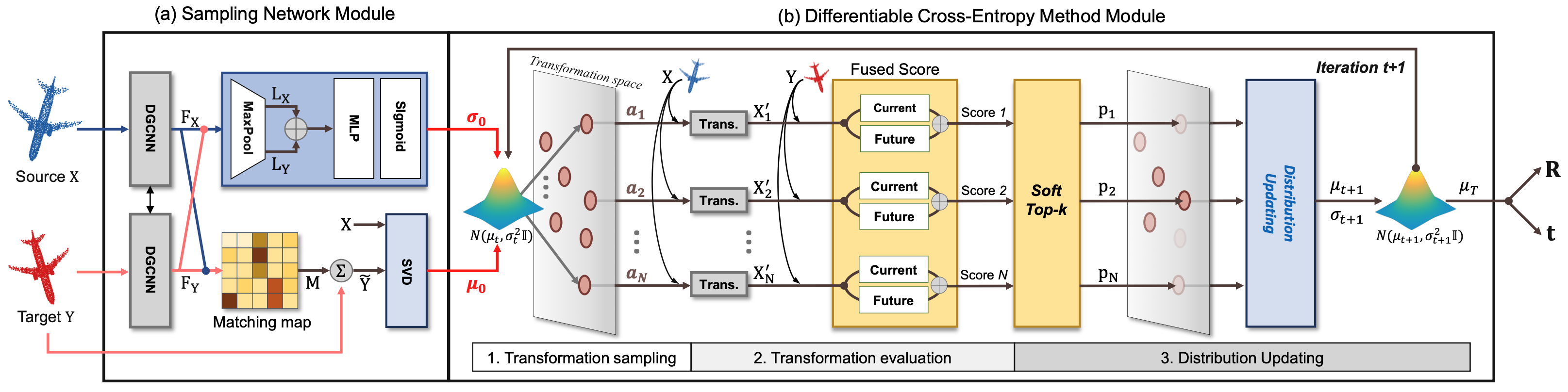
Sampling Network Guided Cross-Entropy Method for Unsupervised Point Cloud Registration (Code)
Haobo Jiang, Yaqi Shen, Jin Xie, Jun Li, Jianjun Qian, and Jian Yang
- An end-to-end CEM-based deep model for unsupervised point cloud registration.
- A sampling network that predicts promising transformation regions for efficient search.
- An ICP-driven reward and sparsemax-based soft top-k selection for differentiable candidate optimization.
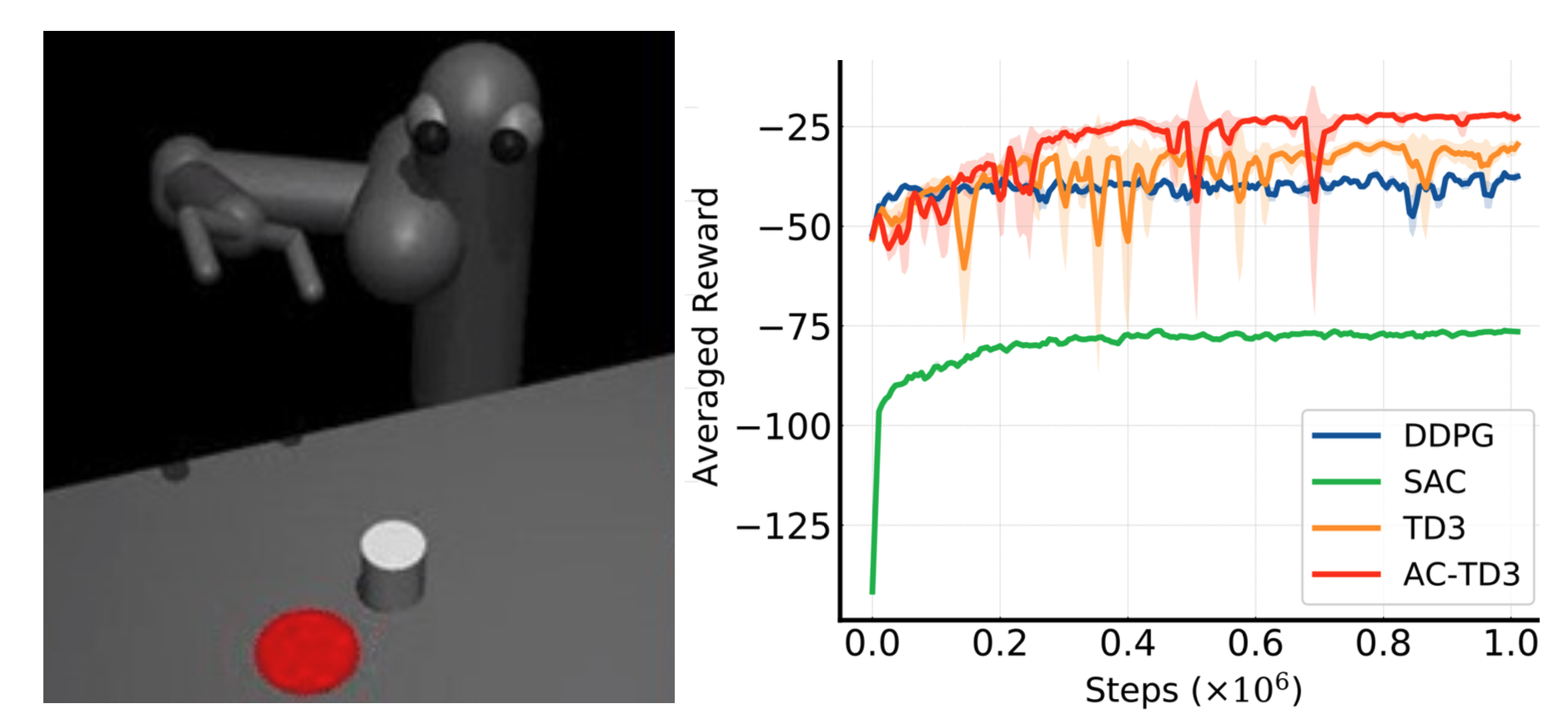
Action Candidate Driven Clipped Double Q-learning for Discrete and Continuous Action Tasks (Code)
Haobo Jiang, Jin Xie, and Jian Yang
- An action-candidate clipped double estimator that balances overestimation and underestimation bias.
- Theoretical analysis on bias reduction, variance balance, and convergence.
- Integration into Double Q-learning and TD3 for robust discrete and continuous control.
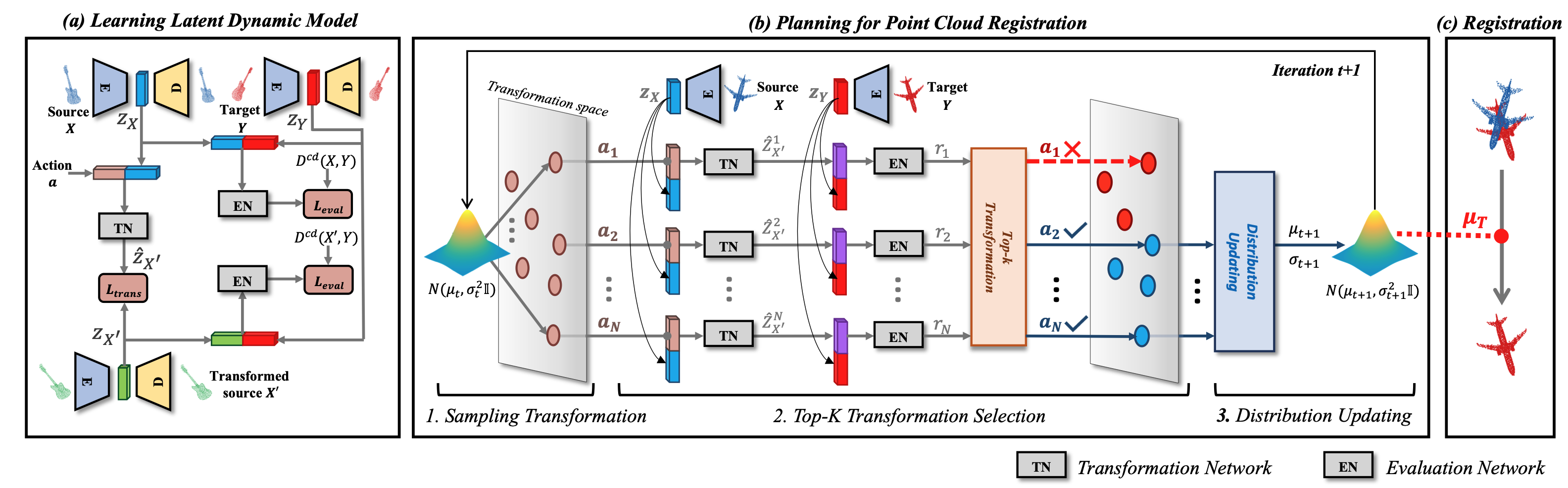
Planning with Learned Dynamic Model for Unsupervised Point Cloud Registration (Code)
Haobo Jiang, Jin Xie, Jianjun Qian and Jian Yang
- The first to formulate point-cloud registration as a Markov decision process for RL-based alignment.
- A latent dynamics model of point clouds, i.e., a 3D world model, for CEM-based planning.
- Planning with the learned latent dynamics model for unsupervised point-cloud registration.
📝 Full Publications
2026
- Haobo Jiang, Jin Xie, Jian Yang, Liang Yu and Jianmin Zheng, “FUSER: Feed-Forward MUltiview 3D Registration Transformer and SE(3)N Diffusion Refinement”, CVPR 2026 (⭐Oral) (pdf, code)
- Haobo Jiang, Liang Yu and Jianmin Zheng, “GM-R2: Generative Matching Learning for Unsupervised Geometric Representation and Registration”, CVPR 2026 (⭐Highlight) (pdf, code)
- Kangjian Zhu, Haobo Jiang#, Jianjun Qian and Jin Xie, “A Cross-view Fusion Framework for Robust 6-DoF Grasp Pose Estimation”, CVPR 2026 (pdf, code, Corresponding Author#)
- Jiayi Yuan, Haobo Jiang, De Wen Soh and Na Zhao, “VGGT-360: Geometry-Consistent Zero-Shot Panoramic Depth Estimation”, CVPR 2026 (pdf, code)
- Yihao Chen, Haobo Jiang, Liang Yu and Jianmin Zheng, “SchellingFormer: Laplacian Matrix-guided Geometric Transformer for Robust Schelling Point Detection”, AAAI 2026 (pdf, code, Equal Contribution)
- Yijie Ding, Yang Liu, Haobo Jiang and Jianmin Zheng, “ReACT: Reward-informed Autoregressive Decision CAD Transformer”, AAAI 2026 (pdf, code)
- Jiawei Lian, Zhengxue Wang, Wentao Qu, Haobo Jiang, Le Hui and Jian Yang, “Diffusion-Based Contextual Reconstruction for Point Cloud Segmentation with Limited Annotations”, AAAI 2026 (pdf, code)
2025
- Haobo Jiang, Jin Xie, Jian Yang, Liang Yu and Jianmin Zheng, “Zero-shot RGB-D Point Cloud Registration with Pre-trained Large Vision Model”, CVPR 2025 (pdf, code)
- Haobo Jiang, Jin Xie, Jian Yang, Liang Yu and Jianmin Zheng, “Generative Point Cloud Registration”, ICML 2025 (pdf, code)
- Tianyu Zhang, Haobo Jiang, Jian Yang and Jin Xie, “DiffPCI: Large Motion Point Cloud Frame Interpolation with Diffusion Model”, ICCV 2025 (pdf, code)
- Wei Xie, Haobo Jiang, Yun Zhu, Jianjun Qian and Jin Xie, “NaviFormer: A Spatio-Temporal Context-Aware Transformer for Object Navigation”, AAAI 2025 (pdf, code)
- Kangjian Zhu, Haobo Jiang, Yigong Zhang, Jianjun Qian, Jian Yang and Jin Xie, “MonoSE(3)-Diffusion: A Monocular SE(3) Diffusion Framework for Robust Camera-to-Robot Pose Estimation”, IEEE Robotics and Automation Letters 2025 (pdf, code)
- Xingyu Zhou, Haobo Jiang and Jian Yang, “Knowledge Distillation for 3D Registration by Locally and Globally Aligning Geometric Representations”, PRCV 2025 (pdf, code)
2024
- Qianliang Wu, Haobo Jiang, Lei Luo, Jun Li, Yaqing Ding, Jin Xie and Jian Yang, “Diff-Reg: Diffusion Model in Doubly Stochastic Matrix Space for Registration Problem”, ECCV 2024 (pdf, code)
- Qianliang Wu, Yaqing Ding, Lei Luo, Haobo Jiang, Shuo Gu, Chuanwei Zhou, Jin Xie and Jian Yang, “SGNet: Salient Geometric Network for Point Cloud Registration”, IROS 2024 (pdf, code)
- Can Xu, Le Hui, Yuehui Han, Haobo Jiang, Jiaxin Chen, Jin Xie and Jian Yang, “Learning Local Semantic Region Activations for Weakly Supervised Object Localization”, IEEE Trans. on Circuits and Systems for Video Technology 2024 (pdf, code)
- Yuechen Xie, Haobo Jiang and Jin Xie, “Mask6D: Masked Pose Priors for 6D Object Pose Estimation”, ICASSP 2024 (pdf, code)
2023
- Haobo Jiang, Zheng Dang, Zhen Wei, Jin Xie, Jian Yang and Mathieu Salzmann, “Robust Outlier Rejection for 3D Registration with Variational Bayes”, CVPR 2023 (pdf, code)
- Haobo Jiang, Mathieu Salzmann, Zheng Dang, Jin Xie and Jian Yang, “SE(3) Diffusion Model-Based Point Cloud Registration for Robust 6D Object Pose Estimation”, NeurIPS 2023 (pdf, code)
- Haobo Jiang, Mathieu Salzmann, Zheng Dang, Jin Xie and Jian Yang, “Center-Based Decoupled Point Cloud Registration for 6D Object Pose Estimation”, ICCV 2023 (pdf, code)
- Haobo Jiang, Kaihao Lan, Le Hui, Guangyu Li, Jin Xie and Jian Yang, “Point Cloud Registration-Driven Robust Feature Matching for 3D Siamese Object Tracking”, IEEE Trans. on Neural Network and Learning Systems 2023 (pdf, code)
- Jiayi Yuan, *Haobo Jiang*, Xiang Li, Jianjun Qian, Jun Li and Jian Yang, “Recurrent Structure Attention Guidance for Depth Super-Resolution”, **AAAI 2023 (pdf, code, Equal Contribution)
- Jiayi Yuan, *Haobo Jiang*, Xiang Li, Jianjun Qian, Jun Li and Jian Yang, “Structure Flow-Guided Network for Real Depth Super-Resolution”, **AAAI 2023 (pdf, code, Equal Contribution)
- Wei Xie, Haobo Jiang, Shuo Gu and Jin Xie, “Implicit Obstacle Map-Driven Indoor Navigation Model for Robust Obstacle Avoidance”, ACM MM 2023 (pdf, code)
- Qianliang Wu, Yaqi Shen, Haobo Jiang, Guofeng Mei, Yaqing Ding, Lei Luo, Jin Xie and Jian Yang, “Graph Matching Optimization Network for Point Cloud Registration”, IROS 2023 (pdf, code)
2022
- Haobo Jiang, Guangyu Li, Jin Xie and Jian Yang, “Action Candidate Driven Clipped Double Q-Learning for Discrete and Continuous Action Tasks”, IEEE Trans. on Neural Network and Learning Systems 2022 (pdf, code)
- Yaqi Shen, Le Hui, Haobo Jiang, Jin Xie and Jian Yang, “Reliable Inlier Evaluation for Unsupervised Point Cloud Registration”, AAAI 2022 (pdf, code)
- Yuehui Han, Le Hui, Haobo Jiang, Jianjun Qian and Jin Xie, “Generative Subgraph Contrast for Self-Supervised Graph Representation Learning”, ECCV 2022 (pdf, code)
- Kaihao Lan, Haobo Jiang and Jin Xie, “Temporal-Aware Siamese Tracker: Integrate Temporal Context for 3D Object Tracking”, ACCV 2022 (pdf, code)
- Weiqi Zhao, Haobo Jiang and Jin Xie, “Fast Proximal Policy Optimization”, ACPR 2022 (🏆Best Paper Award) (pdf, code)
2021
- Haobo Jiang, Jin Xie and Jian Yang, “Action Candidate Based Clipped Double Q-Learning for Discrete and Continuous Action Tasks”, AAAI 2021 (pdf, code)
- Haobo Jiang, Yaqi Shen, Jin Xie, Jun Li, Jianjun Qian and Jian Yang, “Sampling Network Guided Cross-Entropy Method for Unsupervised Point Cloud Registration”, ICCV 2021 (pdf, code)
- Haobo Jiang, Jin Xie and Jian Yang, “Planning with Learned Dynamic Model for Unsupervised Point Cloud Registration”, IJCAI 2021 (pdf, code)
2018
- Haobo Jiang, Jianjun Qian, Jin Xie and Jian Yang, “Episode-Experience Replay Based Tree-Backup Method for Off-Policy Actor-Critic Algorithm”, PRCV 2018 (pdf, code)
🎖 Honors and Awards
- [2026.06] Best Paper Award Candidate, The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2026
- [2025.11] Nomination Award of China Society of Image and Graphics (CSIG, 中国图象图形学学会) Outstanding Doctoral Thesis
- [2022.01] Best Paper Award, Asian Conference on Pattern Recognition (ACPR), 2021
- [2021.10] National Graduate Scholarship (Top 2%), NJUST
🤝 Academic Services
- Area Chair / IPC Member: ICIG 2026; Pacific Graphics 2026
- Conference Reviewer: CVPR, ICCV, ECCV, NeurIPS, ICLR, ICML, ACM MM, AAAI
- Journal Reviewer: IEEE TPAMI, IEEE TIP, IEEE TNNLS, IEEE TCSVT, IEEE TVCG, IEEE RAL, PR